一、蓝鲸波浪滑翔机简介
蓝鲸波浪滑翔机由水面母船、水下牵引机及中间吊装通讯缆组成。水面母船安装有太阳能电池板,同时设置有主控系统和通导设备等;水下牵引机由主框架、6对流线型NACA水翼及转向组件组成,同时水下牵引机可加装螺旋桨推进器进行混合推进,以适应不同海况。蓝鲸波浪滑翔机具有自供能源、全球定位、卫星通讯、自主导航等功能,可按照预设路径自主航行或者环绕预定位置虚拟锚泊,从而实现长时序大尺度(1年1万公里)无人自主连续走航测量和远程实时回传,或保持在海面的固定位置对水下、水面设备提供数据传输中继服务。作为科考搭载平台,波浪滑翔机的水面艇体可搭载气象站、声学Modem、荧光剂、测波仪和ADCP流速计等。
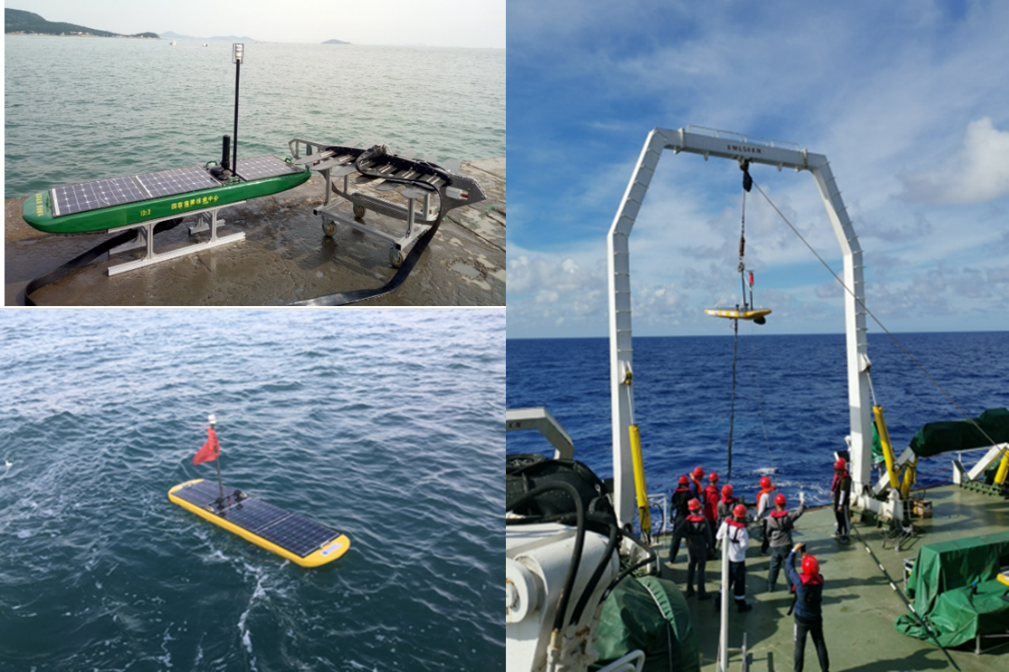
“蓝鲸”系列波浪滑翔机
二、波浪滑翔机的发展
波浪滑翔机起源于美国Liquid Robotics公司,全球已有数十个国家开展了相关技术研究工作。国内波浪滑翔机研究始于2010年前后,以国家海洋技术中心和中船重工710研究所等第一批获得国家863计划支持的科研单位为代表,之后哈尔滨工业大学、上海交通大学、中国海洋大学、中科院沈阳自动化研究所等也纷纷开展了波浪滑翔机相关技术研究工作。目前技术较为成熟的波浪滑翔机有国家海洋技术中心研制的“蓝鲸”、中船重工710研究所研制的“海瑶”、中国海洋大学研制的“海哨兵”等,已广泛应用于海洋环境调查、海洋科考、油气探测、生态监测等诸多领域。
三、突破核心技术,打破技术垄断
在国家重点研发计划、863计划、国家自然科学基金等项目的支持下,中心科研团队先后突破了多项关键技术。
(1)突破波浪能高效捕获及利用技术:基于扑翼摆动控制提高波浪的转化和利用技术,提升波浪滑翔机航速,增强其控位能力,拓宽应用领域;
(2)突破多传感器搭载及应用技术:蓝鲸系列波浪滑翔机目前已搭载应用温盐、温度链、气象、波浪、声学多普勒流速剖面(ADCP)、噪声、生态等传感器,实现了海洋多参数实时观测;
(3)突破多平台跨域组网技术:开展多台(套)波浪滑翔机和水下水面观测装备的组网应用,实现水下和水面的多参数、多维度跨区域实时观测,构建实时海面立体观测网络;
(4)突破基于波浪滑翔机的海面移动通信技术:利用波浪滑翔机的实时通信及强大负载能力,搭载水声通信装备实现水下观测数据的实时传输。以波浪滑翔机为水面通信中继,构建海面移动蜂窝网,实现水下装备与岸基控制中心的实时互联互通。
版权所有:国家海洋技术中心|地址:天津市南开区芥园西道219号增1号|联系电话:022-27536621|传真:022-27367824 |邮编:300112
 津ICP备:09004532号-1
津公网安备12010402002063
津ICP备:09004532号-1
津公网安备12010402002063
 海洋专题
海洋专题